
 产品:6
产品:6

1)socket通信是TCP/IP通信,没有协议,在微软的环境中称为socket
2)插座通信可以做什么?制剂可以发送和接收数据,包括刺字符串,字节阵列等
3)创建套接字机器人需要616-1pc 接口选项
哪个网络端口插入到socket通信网络中?服务端口(IP固定:192.168.125.1)或Wan端口可以,(可自行设置)
5)创建一个client情况下结束:通常ABB机器人和照相机通信,机器人为client的一面。

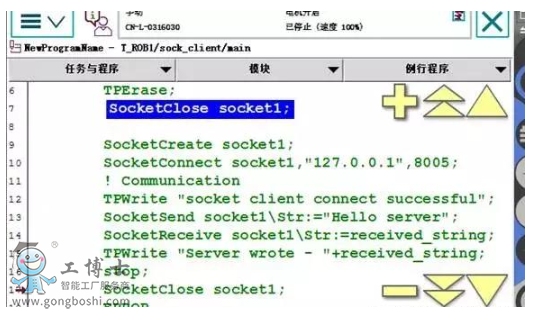
(1)创建新的机器人系统。在系统中添加PC接口选项
(2)为了避免关闭以前的连接失败,请先插入套接字关闭指令,然后为新的套接字dev类型变量插入套接字1
(3)在插入之后创建连接socketCreate
(4)插入建立连接套接字连接,指定服务器的 ip 和端口,如果连接到计算机上的另一个虚拟控制器,ip 设置为“ localhost” ,端口是自定义的,建议不要使用默认的1025。
这一步可以让机器人建立到服务器的连接,如果不成功,它就会等待,如果成功,它就会下降
(5)在这里做试验,成功建立后,插入TPWrite指令,你可以看到在示教socketclinent连接成功
(6)数据可以被发送和接收,在这个例子中client首先向服务器发送数据,然后接收服务器发送回来的数据
(7)socket Send后面可以跟着一个字符串或字节数组,可以选择不同的可选变量
(8)的发送完成之后,client服务器接收数据发送回和写屏

数据的关键信息抽取
摄像机通常向机器人发送字符串,如“1.23,4.56,7.89\0D”,即x为1.23,y为4.56,z为7.89,以\0D为终止符,数据用“,”分隔。
2)如果机器人接收字符串,以及如何提取字符串变量薪酬DELTAX,移动deltaY和thetaZ?
3)设置一些 num 变量来存储过程数据,比如 startbit1,x 的数据开始的地方,endbit1,x 的数据结束的地方,lenbit1,x 的数据长度的地方,s1,提取的 x 的值的字符串。
4)假设x的*位为1,对Startbit1的赋值为1
5)插入功能strfind,**查找“”在第几,值获得EndBit1
6) endbit1减去 startbit1是 x 的数据长度
以同样的方式获取y和θ的信息
8)StrPart函数提取从开始StartBit1 LenBit1结束的字符串,即x的字符串值
9)同样的字符串y和z
10)使用StrToVal函数,S1变成num类型,并且支付给delta_x的反馈值,StrToVal函数是一个bool量,即转换成功为真失败为假
11)同样获得delta_y和delta_theta
关键信息和点数据转换
摄像机发送XY和θ,我们从字符串中提取了x、y和θ值,但机器人点RobTarget由trans:xyz和rot:q1-q4组成。
2)ABB机器人表示角度四元数,如何变换角度四元数?
3)建立一个新的常规
4)Target_10_ini是以前在坐标系Workobjec_1下教授的点,通常是坐标系中的0,0,0或0。
5)Workobject_1一致的坐标系和照相机坐标系中的(相机校准可以通过一个纸棋盘进行校准)
6)程序去点目标,注意存储类型是变量 var,否则不能分配
7)新的num变量或x,或y,或z表示原始点Target_10的姿态ABC数据。
8)通过角度的功能eulerzyx获得的,你只能得到一个角度
9)将摄像机的 x 和 y 的偏差赋给目标的 x 和 y
将摄像机的θ角添加到原来的or_z角中,得到一个新的z方向角
11)orientzyx功能,or_x,or_y,or_z转换回三个四元数姿态Target_10
12)然后你得到新的目标位置和姿势。
来源:网络
更多资讯:ABB喷涂机器人