
 产品:6
产品:6

相当于机器人后台在循环扫描信号,然后由对应信号触发对应中断程序。中断程序内无运动指令,前台机器人运动不影响
2)如果想通过中断让机器人暂停运动,可以在中断里加入stopmove
3)此处举例机器人在工作区域一时,人工进入光幕区域,机器人不停
4)机器人在工作区域二时(会有与人交互区域),人工进入光幕区域,机器人停止运动
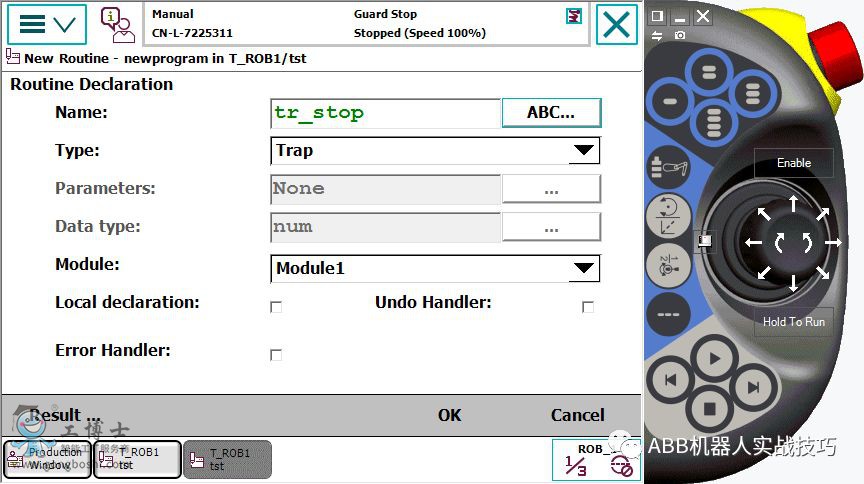
5)建立2个中断程序,如下图,tr_stop处理光栅信号变0时的机器人停止,tr_start处理光栅信号变1时的机器人启动
6)插入如下初始化程序

插入方法:添加指令,选择interrupt分类
其中:CONNECT intstart WITH tr_start表示建立intstart中断号和tr_start中断程序的连接,
ISignalDI di_0,1,intstart表示信号0变1时触发(注意,默认插入是会带有single参数,即只会**次发生中断触发,之后不会再触发。要反复触发,去除single参数)
7)在循环里插入如下中断控制指令

ISleep即为停用中断,在此期间产生的中断机器人忽略
IWatch为恢复使用中断,和ISleep构成一对。
8)上图即位在path_1时,不启用中断,path_2启用中断
来源:网络
更多资讯:ABB喷涂机器人